TexasBob
Well-Known Member
Normally I do not care but so much of what you have written here is incorrect that I feel like I am obligated to try to correct the facts (I will leave the opinions alone, they are yours to enjoy)
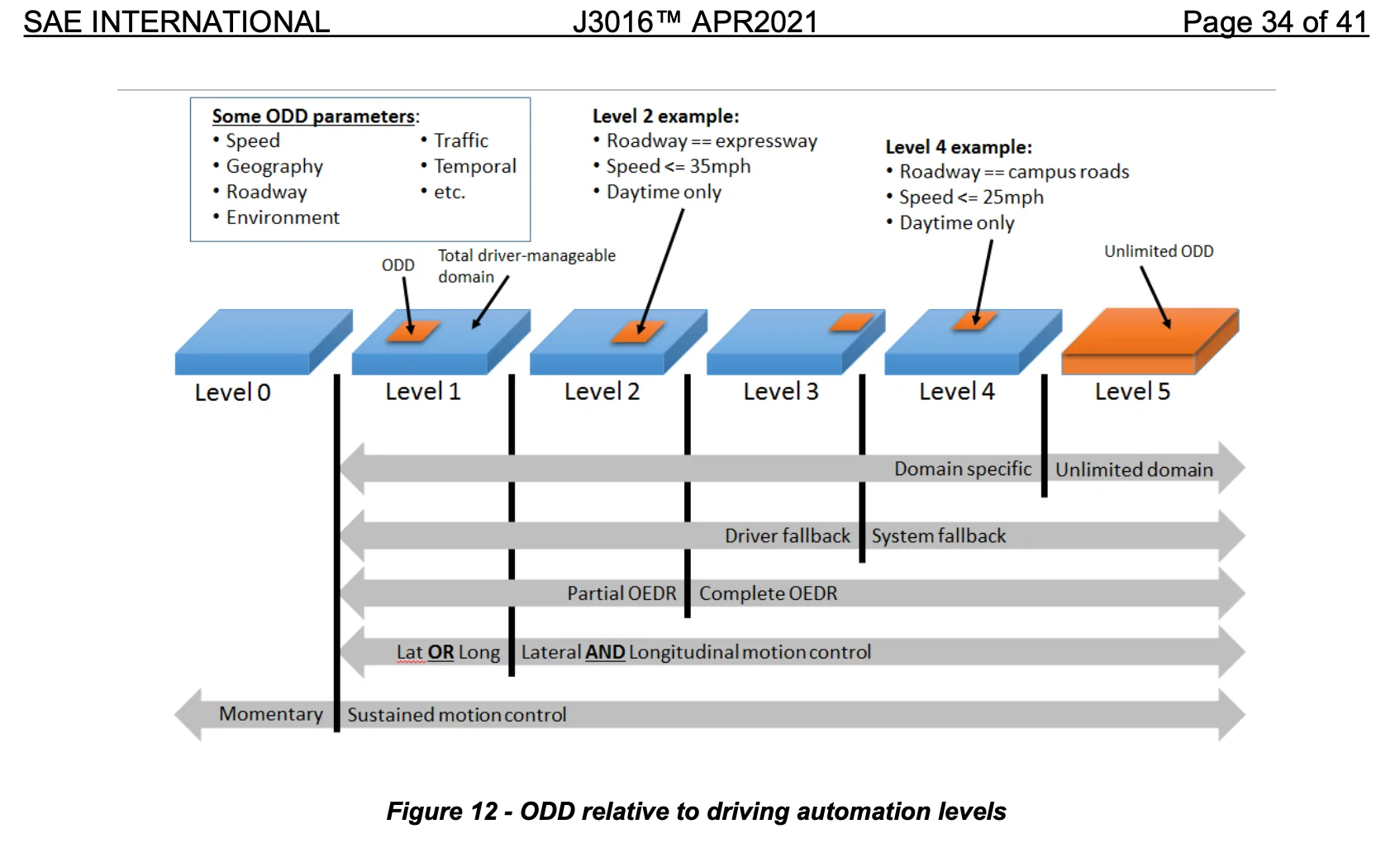
Literally not a single one of the limitations you described above are L3 characteristics. The ODD (the geographies and circumstances in which the system is qualified to drive) is completely open for the manufacturer to specify in L3 or L4. There is absolutely no difference whatsoever in the SAE definition of the ODD for L3 or L4. The system you are sort-of describing is an example of one early system as it was implemented in one geography (the old Merc system) but it is not representative of an L3.
Level 3: "The sustained and ODD-specific performance by an ADS of the entire Dynamic Driving Task under routine/normal operation with the expectation that the DDT fallback-ready user is receptive to ADS-issued requests to intervene, as well as to DDT performance-relevant system failures in other vehicle systems, and will respond appropriately."
Level 4: "The sustained and ODD-specific performance by an ADS of the entire DDT and DDT fallback."
I will note a factual error: Waymo is becoming statistically safer, not less safe (c.f. its million-mile actuarial data). Also, your description on HD maps seems to reflect a dated understanding of how these vehicles navigate. While Waymo's production fleet still leverages HD maps as a baseline, the core architecture long ago left behind brittle, rules-based software. The industry is pretty much universally moving toward end-to-end neural networks and world models. Waymo's primary AI research—including its EMMA framework—utilizes Vision-Language-Action (VLA) models, while its actual production fleet relies on distilled generative machine-learning planners. Tesla is deploying parallel end-to-end neural networks (pure vision-to-control) with its current FSD v14 deployment and upcoming 10x-parameter v15 architecture. The industry is converging on these unified perception-to-action networks, meaning the vehicle actively calculates spatial physics in real time rather than primarily relying on a pre-mapped path against an HD map reference.
Absolutely none of that is true. Go back and re-read the SAE definition then go read the UN Regulation 157 and the Chinese GB 44721 to get a lay of the regulatory landscape. Sticking to the SAE definition, there is only one difference between L3 and L4 and that is who is responsible for "fallback" if the system encounters a situation it is unable to handle. In an L4, the system is required to be failsafe and be its own fallback. In an L3, the human driver is the fallback or failsafe and must be able to take over in 10 - 15 seconds (depending jurisdiction).These are not directly comparable and your logic is really terrible.
A L3 vehicle is almost certainly an extremely unsafe vehicle. You should never get into a vehicle with level 3 technology.
l3 vehicles are extremely restricted (lead car, weather, time of day, perfect lanes, mapping, etc.) and do not contain the necessary safety features of an autonomous vehicle (avoiding advanced accidents, minimum risk manuevers, performing the entire DDT)
Literally not a single one of the limitations you described above are L3 characteristics. The ODD (the geographies and circumstances in which the system is qualified to drive) is completely open for the manufacturer to specify in L3 or L4. There is absolutely no difference whatsoever in the SAE definition of the ODD for L3 or L4. The system you are sort-of describing is an example of one early system as it was implemented in one geography (the old Merc system) but it is not representative of an L3.
Level 3: "The sustained and ODD-specific performance by an ADS of the entire Dynamic Driving Task under routine/normal operation with the expectation that the DDT fallback-ready user is receptive to ADS-issued requests to intervene, as well as to DDT performance-relevant system failures in other vehicle systems, and will respond appropriately."
Level 4: "The sustained and ODD-specific performance by an ADS of the entire DDT and DDT fallback."
What you are describing is a Level 2 system (often called a L2++ system) which requires eyes on. The L3 system is, by definition, an eyes off system and the driver is not responsible for the vehicle's performance while the system is on. If the system needs the driver to take over, it must give him/her sufficient warning to allow them to look back at the road, re-orient, and take over (10-15 second depending on jurisdiction).The issue with that is they put all risk on the lead car where all of the sudden a lead car can dodge a stationary vehicle and you are dead. you can have other issues like mechanical failures (where l3 is not responsible) and if you are reading a book or watching a movie this is extremely dangerous. No company should pursue any autonomy other than level 4. Level 4 can be restricted to only highways although that is likely not happening.
I am reading the data that tells me running on an autonomous system is much safer than operating the vehicle myself. I do assume that the L3 / L4 systems available for consumers will also have this improved safety. The odd incident here and there - though sometimes tragic - does not change that. Humans are involved in an accident every 250k mile +/-. Worth noting that according to the Dallas Morning News the Avride incidents you are describing is a vehicle with a human safety driver at the wheel.your logic also assumes that all L4 vehicles will have good accident avoidance. There was an AVride crash filmed by a world cup fan where it crashed into a vehicle that ran a stop sign. Tesla FSD would have prevented this 3 or 4 years ago
I won't debate the methodology on Waymo's driving statistics; you can read the report and the methodology and decide for yourself. I will opine that my reading indicates they have done a very good job of trying to make the data comparable. Even if they are overstating the case massively—I do not think they are—the autonomous vehicles are vastly safer than humans.Waymo statistics are not comparable because they avoid difficult intersections (seemingly even more than robotaxi) and drive at relatively low speeds. In that scenario where waymo was washed away for 2 days the person inside could have easily died if it were not for the fact that the car were empty. Waymo does not have enough miles to statistically say they are very safe yet.
This doesn't also account for some accidents they may or may not cause from doing things like driving the wrong way down roads. Waymo uses HD maps and they seemed to have loosened the usage of said maps. The cars are driving much worse because of it.
I will note a factual error: Waymo is becoming statistically safer, not less safe (c.f. its million-mile actuarial data). Also, your description on HD maps seems to reflect a dated understanding of how these vehicles navigate. While Waymo's production fleet still leverages HD maps as a baseline, the core architecture long ago left behind brittle, rules-based software. The industry is pretty much universally moving toward end-to-end neural networks and world models. Waymo's primary AI research—including its EMMA framework—utilizes Vision-Language-Action (VLA) models, while its actual production fleet relies on distilled generative machine-learning planners. Tesla is deploying parallel end-to-end neural networks (pure vision-to-control) with its current FSD v14 deployment and upcoming 10x-parameter v15 architecture. The industry is converging on these unified perception-to-action networks, meaning the vehicle actively calculates spatial physics in real time rather than primarily relying on a pre-mapped path against an HD map reference.
Sponsored